- FirstAp
- RegAddr
- Status
- Arith
- MidGoto
- LowGoto
- CondJump
- VarMani
- VarArray
- StackOps
- FirstCal
- StakCall
- CallBUp
- Table0
- ArbTable
- SmallTbl
- StateMC
- LEDOn
- Current Consumption Check
- Debounce
- PinChg
- TimeEnd
- Decouple
- WDT
- PowerUp
- Reset
- TMR0
- Random
- Sleep
- DiffOsc
- EEPROM
- SHORT
- ADCLess
- ADC
- VLadder
- PWMOut
- Cylon
- TMR0Int
- LEDPWM
- IntDeb
- TrueRS
- BasicRS
- SimpRS
- 3RS
- Debug
Useful Code Snippets and Macros

"TMR0Int" Experiment
I always like looking at something from a different perspective. The genesis of this experiment was a question that was asked on the PICList; could you set up TMR0 so that the next detected edge causes an interrupt? The answer to that is yes, and it is demonstrated in this experiment.
By using the code in this experiment, you can add another interrupt source to your mid-range PICmicro® MCU application, or use it to capture events in a low-end application. Using this application to capture events in the low-end PICmicro MCU gives it the ability to "record" pulses or behave like a simple interrupt request generator (when TMR0 is equal to zero, then execute the response handler).
This experiment uses the circuit shown below:
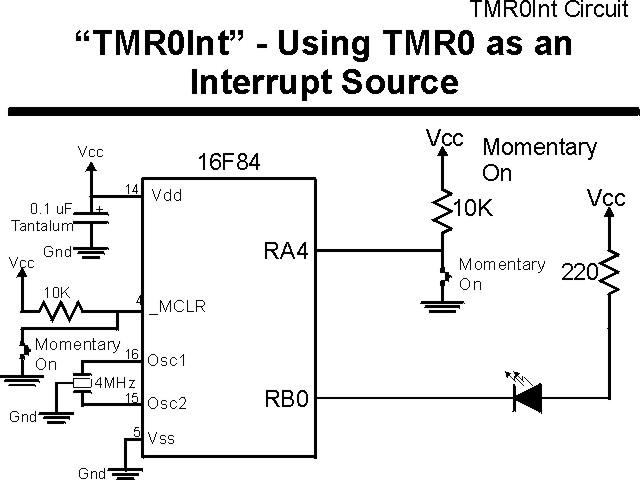
The parts needed for this experiment are listed in the table:
| Part | Description | Required for the YAP-II/EMU-II? |
|---|---|---|
| PICmicro® MCU | PIC16F84-04/P PIC16F877-04/P |
In Socket |
| Vdd/Vss Decoupling Capacitor | 0.1 uF (Any Type) | No |
| _MCLR Pull Up Resistor | 10K, 1/4 Watt | No |
| 4 MHz Ceramic Resonator | Three Leaded Ceramic Resonator with Built in 27-33pF Capacitors | No |
| RA4 Pull Up | 10K, 1/4 Watt | No - "BUT1" Used |
| RA4 Push Button | Momentary On/Modified for Breadboard | No - "BUT1" Used |
| PORTB LED Current Limiting Resistors | 8x 220W, 1/4 Watt | No - "LED1" Used |
| PORTB LED | 10 LED "Bargraph" Recommended | No - "LED1" through "LED9" Used |
| Breadboard | Any Type | No |
| +5 Volt "Vcc" Power Supply | Any Type | No |
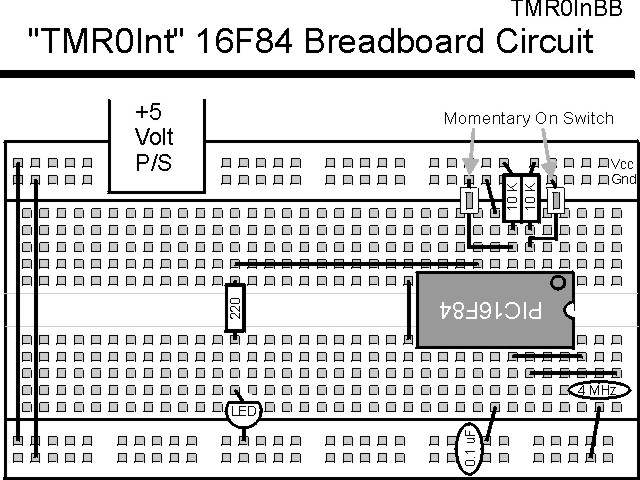
Using a breadboard, the experiment is wired using the guide:
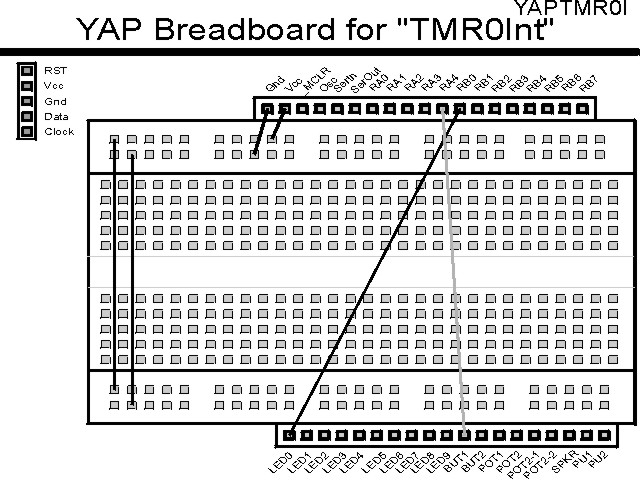
If the EMU-II or YAP-II is used, the experiment is wired as:
The source code listed below can be accessed from the CD-ROM by clicking Here.
title "TMR0Int - Treat TMR0 Input like an Interrupt Input"
;
; This Application uses the TMR0 Input Pin (RA4 in the mid-range
; PICmicros) as an interrupt source. When the input data changes,
; TMR0 overflows, which causes an interrupt request.
;
; Hardware Notes:
; This application runs on a PIC16F84 executing at 4 MHz
; _MCLR is tied through a 10K Resistor to Vcc and PWRT is Enabled
; A 10K Pull-Up and a Momentary "On" Switch is Connected to RA4
; A 220 Ohm Resistor and LED is connected between PORTB.0 and Vcc
;
; Myke Predko
; 99.12.28
;
LIST R=DEC
ifdef __16F84
INCLUDE "p16f84.inc"
else
ifdef __16F877
INCLUDE "p16f877.inc"
endif
; Registers
CBLOCK 0x020
_w, _status ; Context Register Save Values
ENDC
ifdef __16F84
__CONFIG _CP_OFF & _WDT_OFF & _XT_OSC & _PWRTE_ON
else
__CONFIG _CP_OFF & _WDT_OFF & _XT_OSC & _PWRTE_ON & _DEBUG_OFF & _LVP_OFF & _BODEN_OFF
endif
PAGE
; Mainline of cylon
org 0
nop
movlw 0x0FF
movwf PORTB
goto Mainline
org 4
Int ; TMR0 has Overflowed - New Input
bcf INTCON, T0IF ; Reset the Interrupt Flag
bcf PORTB, 0 ; Turn on the LED
retfie
Mainline ; Setup TMR0 Interrupt
bsf STATUS, RP0 ; Goto Bank 1 to set Port Direction
bcf PORTB, 0 ; Enable RB0 for Output
bcf STATUS, RP0 ; Go back to Bank 0
movlw OPTION_REG ; Point to the Option Register
movwf FSR
clrf TMR0 ; Reset the Timer
movlw (1 << GIE) | (1 << T0IE)
movwf INTCON ; Enable Interrupts
movlw 0x0C0 ; Make TMR0 Driven by the Instruction Clock
movwf INDF
movlw 0x0FF
movwf TMR0
bsf INDF, T0CS ; Now, Make TMR0 Driven Externally
Loop ; Loop Here
goto Loop ; Let Interrupt Handler Work in the Background
end