- FirstAp
- RegAddr
- Status
- Arith
- MidGoto
- LowGoto
- CondJump
- VarMani
- VarArray
- StackOps
- FirstCal
- StakCall
- CallBUp
- Table0
- ArbTable
- SmallTbl
- StateMC
- LEDOn
- Current Consumption Check
- Debounce
- PinChg
- TimeEnd
- Decouple
- WDT
- PowerUp
- Reset
- TMR0
- Random
- Sleep
- DiffOsc
- EEPROM
- SHORT
- ADCLess
- ADC
- VLadder
- PWMOut
- Cylon
- TMR0Int
- LEDPWM
- IntDeb
- TrueRS
- BasicRS
- SimpRS
- 3RS
- Debug
Useful Code Snippets and Macros

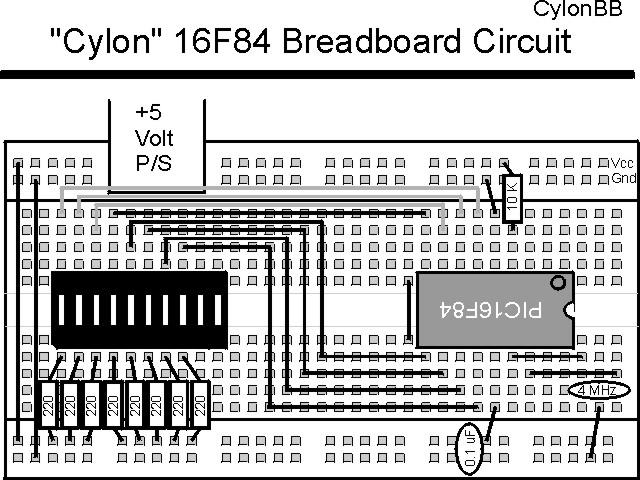
"Cylon" Experiment
Sometimes it's nice to have an indicator of whether or not an application is working properly. This experiment provides a moving "Cylon" (Named after the robots in "Battlestar Gallactica" that clanked around and said "By your command") eye that runs from a TMR0 initiated interrupt handler.
This experiment uses the circuit shown below:

The parts needed for this experiment are listed in the table:
| Part | Description | Required for the YAP-II/EMU-II? |
|---|---|---|
| PICmicro® MCU | PIC16F84-04/P PIC16F877-04/P |
In Socket |
| Vdd/Vss Decoupling Capacitor | 0.1 uF (Any Type) | No |
| _MCLR Pull Up Resistor | 10K, 1/4 Watt | No |
| 4 MHz Ceramic Resonator | Three Leaded Ceramic Resonator with Built in 27-33pF Capacitors | No |
| PORTB LED Current Limiting Resistors | 8x 220W, 1/4 Watt | No - "LED1" Used |
| PORTB LED | 10 LED "Bargraph" Recommended | No - "LED1" through "LED9" Used |
| Breadboard | Any Type | No |
| +5 Volt "Vcc" Power Supply | Any Type | No |
Using a breadboard, the experiment is wired using the guide:
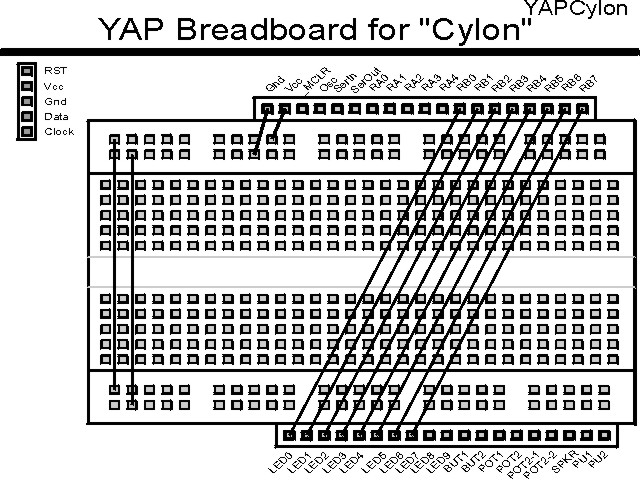
If the EMU-II or YAP-II is used, the experiment is wired as:
The source code listed below can be accessed from the CD-ROM by clicking Here.
title "Cylon - Output a Cylon Eye in the Background"
#define nDebug
;
; This Application uses TMR0 to Move a "Cylon Eye" back and forth
; Across eight LEDs connected to PORTB.
;
; Hardware Notes:
; This application runs on a 16F84 executing at 4 MHz
; _MCLR is tied through a 10K Resistor to Vcc and PWRT is Enabled
; A 220 Ohm Resistor and LED is connected between PORTB.0 and Vcc
;
; Myke Predko
; 99.12.28
;
LIST R=DEC
ifdef __16F84
INCLUDE "p16f84.inc"
else
ifdef __16F877
INCLUDE "p16f877.inc"
endif
; Registers
CBLOCK 0x020
_w, _status ; Context Register Save Values
Direction ; 0 for Up, !0 for Down
Count ; Count the Number of Times Through
ENDC
ifdef __16F84
__CONFIG _CP_OFF & _WDT_OFF & _XT_OSC & _PWRTE_ON
else
__CONFIG _CP_OFF & _WDT_OFF & _XT_OSC & _PWRTE_ON & _DEBUG_OFF & _LVP_OFF & _BODEN_OFF
endif
PAGE
; Mainline of cylon
org 0
nop
movlw 2 ; Setup the Count
movwf Count
goto Mainline
org 4
Int ; Interrupt Handler
movwf _w ; Save Context Registers
movf STATUS, w ; - Assume TMR0 is the only enabled Interrupt
movwf _status
bcf INTCON, T0IF ; Reset the Interrupt Flag
decfsz Count, f ; Execute Once Every Two times
goto IntEnd
movlw 2 ; Reset the Counter
movwf Count
btfss PORTB, 7 ; At the Top?
bsf Direction, 0
btfss PORTB, 0 ; At the Bottom?
bcf Direction, 0
btfsc Direction, 0 ; Going Up?
goto Down ; No, Down
Up ; Moving the LEDs Up
bsf STATUS, C ; Set the Status Flag
rlf PORTB, f ; Shift the Data Up
goto IntEnd
Down
bsf STATUS, C ; Shift the Data Down
rrf PORTB, f
IntEnd
movf _status, w ; Restore the Context Registers
movwf STATUS
swapf _w, f
swapf _w, w
retfie
Mainline ; Setup PWM And Monitor it, Updating "PWMOn"
clrf Direction
movlw 0x0E7 ; Start in the Middle
movwf PORTB
bsf STATUS, RP0 ; Goto Bank 1 to set Port Direction
clrf TRISB ^ 0x080 ; PORTB is Output
ifdef Debug
movlw 0x0D0 ; Debug - Minimum Timer Delay
else
movlw 0x0D7 ; Normal Operation - Maximum Timer
endif
movwf OPTION_REG ^ 0x080
bcf STATUS, RP0 ; Go back to Bank 0
clrf TMR0 ; Start the Timer from Scratch
movlw (1 << GIE) + (1 << T0IE)
movwf INTCON ; Enable Interrupts
Loop ; Loop Here
goto Loop ; Let Interrupt Handler Work in the Background
end
Click Here to look at the thirty eighth experiment - TMR0Int