- FirstAp
- RegAddr
- Status
- Arith
- MidGoto
- LowGoto
- CondJump
- VarMani
- VarArray
- StackOps
- FirstCal
- StakCall
- CallBUp
- Table0
- ArbTable
- SmallTbl
- StateMC
- LEDOn
- Current Consumption Check
- Debounce
- PinChg
- TimeEnd
- Decouple
- WDT
- PowerUp
- Reset
- TMR0
- Random
- Sleep
- DiffOsc
- EEPROM
- SHORT
- ADCLess
- ADC
- VLadder
- PWMOut
- Cylon
- TMR0Int
- LEDPWM
- IntDeb
- TrueRS
- BasicRS
- SimpRS
- 3RS
- Debug
Useful Code Snippets and Macros

"LEDPWM" Experiment
An LED can be used to demonstrate how a PWM operates. In this experiment, I vary the period of a PWM going into an LED to demonstrate how the brightness level can be changed. To create the PWM signal, I used the interrupt handler as shown in the pseudo-code:
Interrupt PWMOutput() // When Timer Overflows, Toggle "On" and "Off"
{ // and Reset Timer to the correct delay for the Value
if (PWM == ON) { // If PWM is ON, Turn it off and Set Timer
PWM = off; // Value
TMR0 = PWMPeriod � PWMOn;
} else { // If PWM is off, Turn it ON and Set Timer
PWM = ON; // Value
TMR0 = PWMOn;
} // end if
INTCON.T0IF = 0; // Reset Interrupts
} // End PWMOutput TMR0 Interrupt Handler
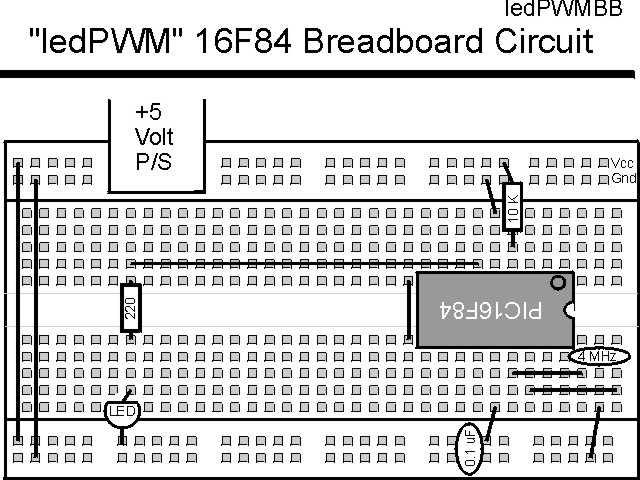
This experiment uses the circuit shown below:

The parts needed for this experiment are listed in the table:
| Part | Description | Required for the YAP-II/EMU-II? |
|---|---|---|
| PICmicro® MCU | PIC16F84-04/P PIC16F877-04/P |
In Socket |
| Vdd/Vss Decoupling Capacitor | 0.1 uF (Any Type) | No |
| _MCLR Pull Up Resistor | 10K, 1/4 Watt | No |
| 4 MHz Ceramic Resonator | Three Leaded Ceramic Resonator with Built in 27-33pF Capacitors | No |
| RB0 LED Current Limiting Resistor | 220W, 1/4 Watt | No - "LED1" Used |
| RB0 LED | Any Type | No - "LED1" Used |
| Breadboard | Any Type | No |
| +5 Volt "Vcc" Power Supply | Any Type | No |
Using a breadboard, the experiment is wired using the guide:
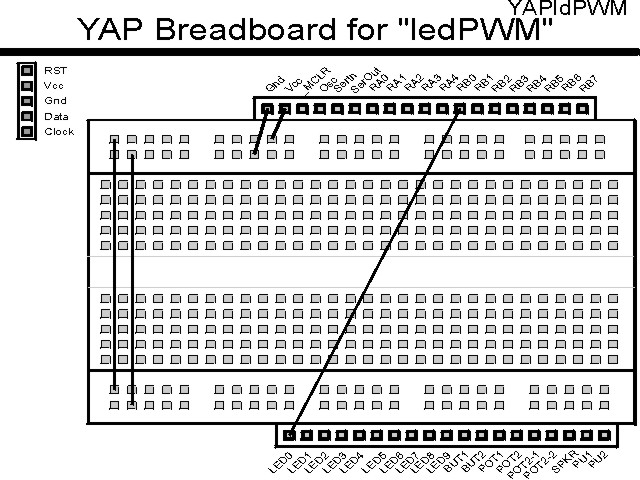
If the EMU-II or YAP-II is used, the experiment is wired as:
The source code listed below can be accessed from the CD-ROM by clicking Here.
title "LedPWM - Show an LED Changing Brightness"
;
; This Application simply waits for the TMR0 interrupt handler to
; occur and after the LED PWM "ON" is complete, decrement the "ON"
; value. This Application repeats endlessly with the LED getting
; lighter before turning off and starting over.
;
; Hardware Notes:
; This application runs on a 16F84 executing at 4 MHz
; _MCLR is tied through a 4.7K Resistor to Vcc and PWRT is Enabled
; A 220 Ohm Resistor and LED is attached to PORTB.0 and Vcc
; A 10K pull up is connected to RA0 and it's state is passed to
; RB0
;
; Myke Predko
; 99.12.14
;
LIST R=DEC
ifdef __16F84
INCLUDE "p16f84.inc"
else
ifdef __16F877
INCLUDE "p16f877.inc"
endif
; Registers
CBLOCK 0x020
_w, _status ; Context Register Save Values
PWMOn:2 ; PWM "On Value"
PWMDouble: 2 ; Divide PWM down for Slowing Down
ENDC
#define PWM PORTB, 0 ; LED on PORTB.0
ifdef __16F84
__CONFIG _CP_OFF & _WDT_OFF & _XT_OSC & _PWRTE_ON
else
__CONFIG _CP_OFF & _WDT_OFF & _XT_OSC & _PWRTE_ON & _DEBUG_OFF & _LVP_OFF & _BODEN_OFF
endif
PAGE
; Mainline of ledpwm
org 0
nop
clrf PWMDouble
clrf PWMDouble + 1
goto Mainline
org 4
Int ; Interrupt Handler
movwf _w ; Save Context Registers
movf STATUS, w ; - Assume TMR0 is the only enabled
movwf _status ; Interrupt
btfsc PWM ; Is PWM O/P Currently High or Low?
goto PWM_ON
nop ; Low - Nop to Match Cycles with High
bsf PWM ; Output the Start of the Pulse
movlw 6 + 6 ; Get the PWM On Period
subwf PWMOn, w ; Add to PWM to Get Correct Period for
; Interrupt Handler Delay and Missed
; cycles in maximum 1024 usec Cycles
goto PWM_Done
PWM_ON ; PWM is On - Turn it Off
bcf PWM ; Output the "Low" of the PWM Cycle
movf PWMOn, w ; Calculate the "Off" Period
sublw 6 + 6 ; Subtract from the Period for the
; Interrupt Handler Delay and Missed
; cycles in maximum 1024 usec Cycles
goto PWM_Done
PWM_Done ; Have Finished Changing the PWM Value
sublw 0 ; Get the Value to Load into the Timer
movwf TMR0
bcf INTCON, T0IF ; Reset the Interrupt Handler
movf _status, w ; Restore the Context Registers
movwf STATUS
swapf _w, f
swapf _w, w
retfie
Mainline ; Setup the PWM And then Monitor it,
; Updating "PWMOn"
bsf PORTB, 0 ; Make the LED on PORTB.0 "off"
; Initially
bsf STATUS, RP0 ; Goto Bank 1 to set Port Direction
bcf TRISB ^ 0x080, 0 ; Set RB0 to Output
movlw 0x0D1 ; Setup TMR0 with a 4x prescaler
movwf OPTION_REG ^ 0x080
bcf STATUS, RP0 ; Go back to Bank 0
clrf TMR0 ; Start the Timer from Scratch
movlw (1 << GIE) + (1 << T0IE)
movwf INTCON ; Enable Interrupts
Loop ; Loop Here
btfsc PWM ; Wait for PWM to go Low
goto $ - 1
incfsz TMR0, w ; Wait for TMR0 to Equal 0x0FF
goto $ - 1
movf PWMDouble, f ; Decrement PWM Double
btfsc STATUS, Z
decf PWMDouble + 1, f
decf PWMDouble, f
rrf PWMDouble + 1, w ; Divide by 4
movwf PWMOn + 1
rrf PWMDouble, w
movwf PWMOn
rrf PWMOn + 1, w
rrf PWMOn, w
addlw 255 - 0x0FE ; Get the High limit
addlw 0x0FE - 0x00E + 1 ; Add Lower Limit to Set Carry
btfss STATUS, C ; If Carry Set, then Lower Case
movlw 0x0FC ; Carry NOT Set, Reset the Character
addlw 0x00E ; Add Lower Limit to restore the
; Character
movwf PWMOn ; Save the New Value
btfss PWM ; Wait for the PWM to Go High
goto $ - 1
goto Loop
end