- TrainCtl
- SLI
- Ultra
- Key
- Clock
- XMAS
- FanCtrl
- IRTank
- IRBetter
- Thermo
- MaryaToy
- MaryaBas
- PCTherm
- Servo
- MIC-II
- Video
- PIC17Dev
- Fuzzy
- RTOS1
- RTOS2

"Ultra" Project
A basic tool needed for bulding robots is the distance measuring device. The Polaroid 6500 was first introduced in the mid 1970s for use in autofocusing cameras, but it can be easily interfaced to the PICmicro® microcontroller as is shown in this application. This application demonstrates how the PICmicro® MCU's with built in clocks and reset can be used to simply "prototype" and learn about external device interfaces.
This project differs from most of the others by its reliance on an external, 1 Amp +5 Volt powersupply.
Click Here to look at the application's source code.
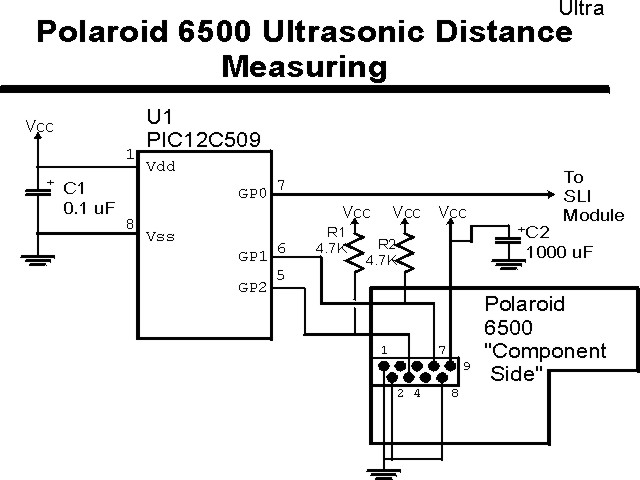
The circuit used for this application is:
The bill of materials for this application is:
| Part | Description |
|---|---|
| U1 | PIC12C509-JW |
| R1, R2 | 4.7K, 1/4 Watt |
| C1 | 0.1 uF, 16 Volt Tantalum Capacitor |
| C2 | 1000 uF, 35 Volt Electrolytic Capacitor |
| Polaroid 6500 | Polaroid 6500 Ultrasonic Distance Finder with Transducer |
| Miscellaneous | Breadboard Prototyping System, Wiring, 1 Amp 5 Volt Power Supply |
The Polaroid 6500's interface pintout is:
| Pin | Description | Function |
|---|---|---|
| 1 | Ground | Connected to Cathode of 1000 uF Capacitor |
| 2 | BLNK | When Asserted, the 6500 will "Blank" out any reflected signal |
| 3 | N/C | Not/Connected |
| 4 | INIT | When Asserted, the 6500 will output the Ultrasonic "Burst" |
| 5 | N/C | Not/Connected |
| 6 | OSC | 49.4 KHz Oscillator |
| 7 | ECHO | Asserted after the Received Signal Returned |
| 8 | BINH | When Asserted, the 6500 will ignore any Transducer "Ringing" |
| 9 | Vcc | Connected to the Anode of 1000 uF Filter Cap |